Road infrastructure constitutes a foundational component of modern societies, underpinning economic activity, public safety, and national connectivity. Highways, as high-capacity arterial corridors, are subject to considerable mechanical and environmental stress, rendering systematic pavement maintenance.
Conventional maintenance practice has relied predominantly on reactive indicators which are inherently indirect and subject to temporal lag. This dependence on manual inspection and retrospective observation delays the identification of emerging pavement deterioration, increasing intervention costs. While recent advances in remote sensing and computer vision have produced promising automated monitoring approaches, large-scale operational deployment in the public sector remains limited. This study addresses that gap by proposing an automated, scalable framework for highway crack localization using openly available high-resolution airborne imagery and convolutional neural networks.
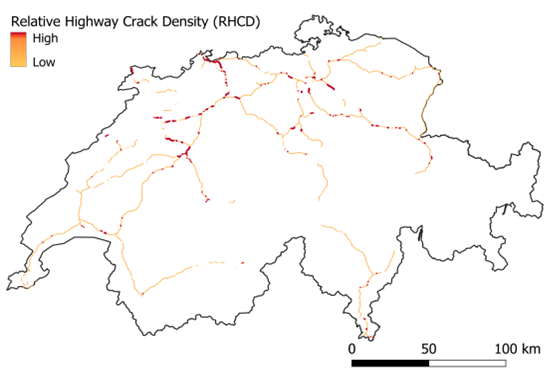
The system is evaluated through a Swiss national highway case study. Although highways constitute less than 3% of the total Swiss road network, they accommodate approximately 45% of vehicle-kilometers, and key corridors serve as critical links within the European „Blue Banana“ economic zone. With approximately CHF 1.737 billion allocated to highway expansion and upkeep in 2024, Switzerland constitutes a well-documented case. Road network data were extracted from OpenStreetMap, and their completeness was assessed using the ohsome Quality Analyst and found to be high as of September 2024. The research is organized around two research questions: the extent to which pavement cracks can be detected at scale from airborne imagery, and the degree to which long-term land surface temperature anomalies (LT-LST-A) and traffic volume correlate with the RHCD index.
The classification model achieved a precision of 0.81 and recall of 0.86 for the positive (crack) class, yielding an F1-score of 0.84, while attaining near-ceiling performance on the negative class (F1 = 0.97). Robustness across varying lighting conditions and pavement textures was supported by a targeted data augmentation strategy and high-resolution input tiling (50 × 50 pixels). Ablation analyses confirmed the contribution of individual pipeline components: removing augmentation reduced F1 by 10.25%, while substituting YOLOv11x-cls with YOLOv8 produced a 5.15% accuracy decline and slower inference. A test-time ensembling strategy further improved classification consistency on ambiguous cases.
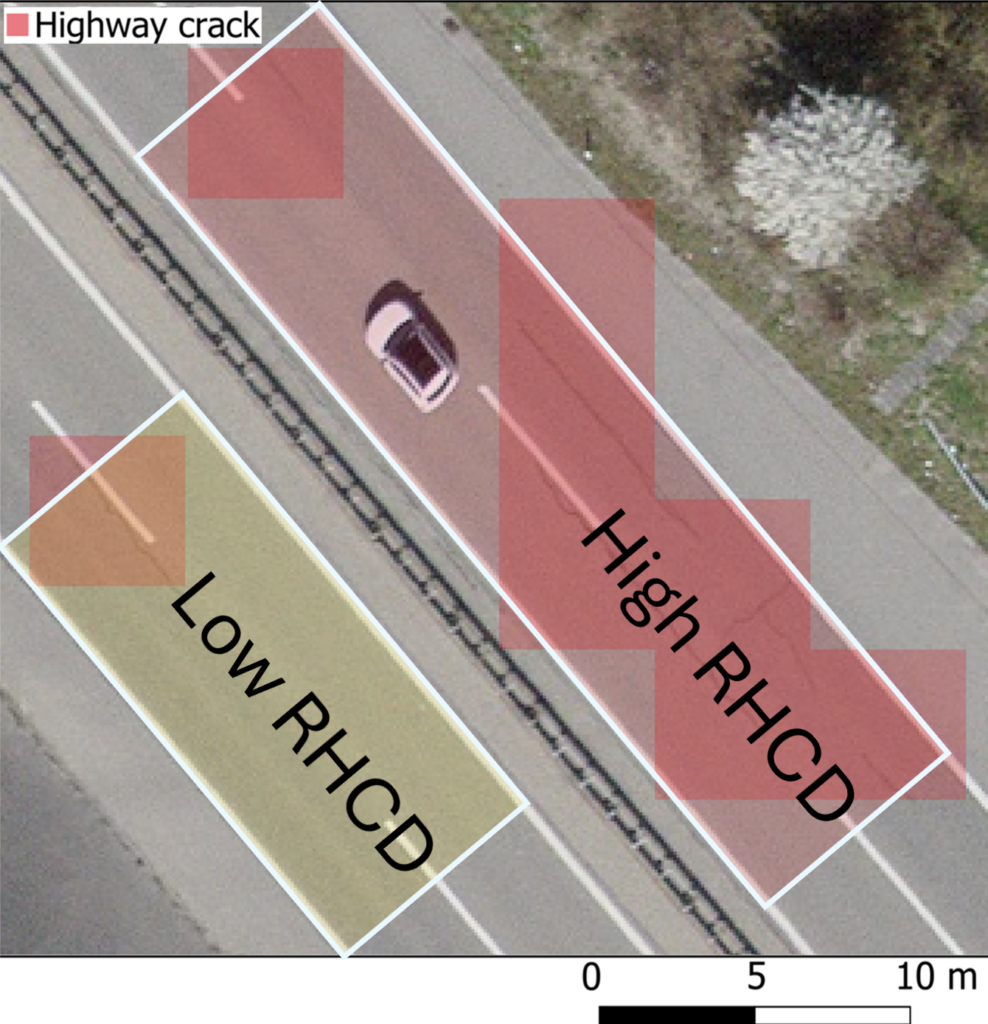
The RHCD index demonstrated superior analytical precision relative to the publicly available LT-LST-A and traffic volume indicators, providing actionable and spatially granular guidance for maintenance prioritization. The proposed framework offers a flexible approach that can be applied across different regions with varying maintenance workflows.
Reference: Knoblauch, S., R. K.Muthusamy, P.Ghamisi, and A.Zipf. 2026. “Automated Road Crack Localization for Spatially Guided Highway Maintenance.” Transactions in GIS30, no. 2: e70258. https://doi.org/10.1111/tgis.70258