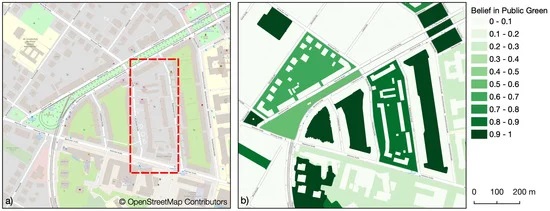
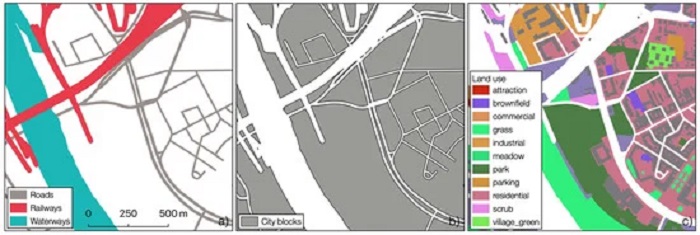
Public urban green spaces are important for the urban quality of life. Still, comprehensive open data sets on urban green spaces are not available for most cities. As open and globally available data sets, the potential of Sentinel-2 satellite imagery and OpenStreetMap (OSM) data for urban green space mapping is high but limited due to their respective uncertainties. Sentinel-2 imagery cannot distinguish public from private green spaces and its spatial resolution of 10 m fails to capture fine-grained urban structures, while in OSM green spaces are not mapped consistently and with the same level of completeness everywhere. To address these limitations, we propose to fuse these data sets under explicit consideration of their uncertainties. The Sentinel-2 derived Normalized Difference Vegetation Index was fused with OSM data using the Dempster–Shafer theory to enhance the detection of small vegetated areas. The distinction between public and private green spaces was achieved using a Bayesian hierarchical model and OSM data. The analysis was performed based on land use parcels derived from OSM data and tested for the city of Dresden, Germany.
Our results showed that fusing OSM and Sentinel-2 data based on Dempster–Shafer theory improved estimates of public urban green spaces to a remarkable degree. This offers potential for improved assessments of urban green spaces and their attached ecosystem services—at least in regions of sufficient OSM data quality. Furthermore, we were able to show that OSM data can be used to estimate the accessibility of green spaces at a reasonable level of uncertainty. The use of context indicators has thereby shown to be of great importance to account for the inconsistency and incompleteness in the data. For the combined model, an overall accuracy of 95% for the prediction of public green spaces could be achieved for our case study region. Uncertainty associated with the predicted public accessibility had a higher effect on accuracy of the combined model than the predicted greenness. While results are promising, further studies are needed to test how far the approach can be used for urban areas with different OSM quality and with different urban planning and biophysical contexts.
Ludwig C, Hecht R, Lautenbach S, Schorcht M, Zipf A. (2021): Mapping Public Urban Green Spaces Based on OpenStreetMap and Sentinel-2 Imagery Using Belief Functions. ISPRS International Journal of Geo-Information. 2021; 10(4):251. https://doi.org/10.3390/ijgi10040251
This article has been written in the context of the mFUND project meingrün using the ohsome API by HeiGIT and belongs to the Special Issue OpenStreetMap as A Multi-Disciplinary Nexus: Perspectives, Practices and Procedures where we also have contributions about:
Schott M, Grinberger AY, Lautenbach S, Zipf A. (2021): The Impact of Community Happenings in OpenStreetMap – Establishing a Framework for Online Community Member Activity Analyses. ISPRS International Journal of Geo-Information. 2021; 10(3):164. https://doi.org/10.3390/ijgi10030164
and
- , , . Regional variations of context‐based association rules in OpenStreetMap. Transactions in GIS. 2020; 00: 1– 21. https://doi.org/10.1111/tgis.12694
- Tost, H., Reichert, M., Braun, U., Reinhard, I., Peters, R. , Lautenbach, S., Andreas, H., Schwarz, E., Ebner-Priemer, U., Zipf, A., Meyer-Lindenberg, A. (2019): Neural correlates of individual differences in affective benefit of real-life urban green space exposure. Nature Neuroscience. https://doi.org/10.1038/s41593-019-0451-y
- Reichert, M., Braun, U., Lautenbach, S., Zipf, A., Ebner-Priemer, U., Tost, H., Meyer-Lindenberg, A. (2020): Studying the impact of built environments on human mental health in everyday life: methodological developments, state-of-the-art and technological frontiers. Current Opinion in Psychology 32, 158-164. https://doi.org/10.1016/j.copsyc.2019.08.026
- Schultz, M., Voss, J., Auer, M., Carter, S., and Zipf, A. (2017): Open land cover from OpenStreetMap and remote sensing. International Journal of Applied Earth Observation and Geoinformation, 63, pp. 206-213. DOI: 10.1016/j.jag.2017.07.014.
- Yan, Y., Schultz, M., Zipf, A. (2019): An exploratory analysis of usability of Flickr tags for land use/land cover attribution, Geo-spatial Information Science (GSIS), Taylor & Francis. https://doi.org/10.1080/10095020.2018.1560044
- Li, H.; Ghamisi, P.; Rasti, B.; Wu, Z.; Shapiro, A.; Schultz, M.; Zipf, A. A Multi-Sensor Fusion Framework Based on Coupled Residual Convolutional Neural Networks. Remote Sensing. 2020, 12, 2067. DOI: https://doi.org/10.3390/rs12122067
- Raifer, M., Troilo, R., Kowatsch, F., Auer, M., Loos, L., Marx, S., Przybill, K., Fendrich, S., Mocnik, F.-B.& Zipf, A. (2019): OSHDB: a framework for spatio-temporal analysis of OpenStreetMap history data.Open Geospatial Data, Software and Standards 2019 4:3. https://doi.org/10.1186/s40965-019-0061-3
- Ludwig, Christina ; Zipf, Alexander (2019): Exploring regional differences in the representation of urban green spaces in OpenStreetMap. Proceedings of the GeoCultGIS – Geographic and Cultural Aspects of Geo-Information: Issues and Solutions, Limassol (Cyprus).
- Novack, T.; Wang, Z.; Zipf, A. (2018): A System for Generating Customized Pleasant Pedestrian Routes Based on OpenStreetMap Data. Sensors 2018, 18, 3794.
- Jokar Arsanjani, J., Mooney, P., Zipf, A., Schauss, A., (2015): Quality assessment of the contributed land use information from OpenStreetMap versus authoritative datasets. In: Jokar Arsanjani, J., Zipf, A., Mooney, P., Helbich, M., (eds) OpenStreetMap in GIScience: experiences, research, applications. ISBN:978-3-319-14279-1, pp. 37-51, Springer Press.
- Dorn, H., Törnros, T. & Zipf, A. (2015): Quality Evaluation of VGI using Authoritative Data – A Comparison with Land Use Data in Southern Germany. ISPRS International Journal of Geo-Information. Vol 4(3), pp. 1657-1671, doi: 10.3390/ijgi4031657
- Jokar Arsanjani, J., Helbich, M., Bakillah, M., Hagenauer,J. & Zipf, A. (2013): Toward mapping land-use patterns from volunteered geographic information. International Journal of Geographical Information Science (IJGIS). Taylor & Francis. DOI: 10.1080/13658816.2013.800871.



