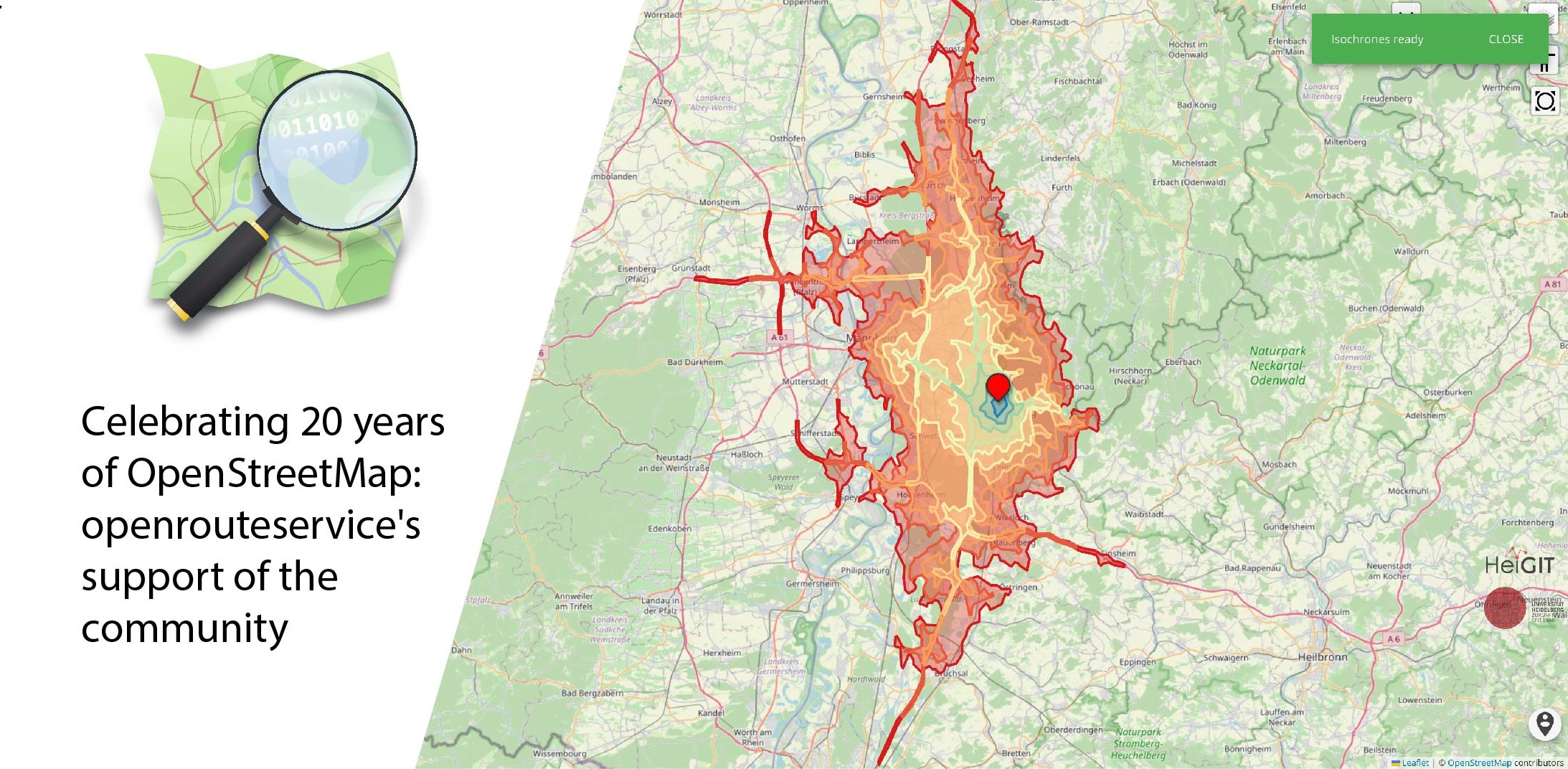
August 9 marks a turning point for the global mapping community: the 20th anniversary of OpenStreetMap (OSM). For two decades, OSM has revolutionized the way we perceive and interact with maps, transforming them from static representations to dynamic, community-driven resources. OpenStreetMap began as a visionary project aimed at creating a free, editable map of the world. What started as a small initiative has grown into a global movement with millions of contributors. These volunteers, ranging from hobbyists to professionals, have mapped everything from urban landscapes to remote villages, creating an unparalleled open data resource.
At HeiGIT, our journey with OSM has been integral to our mission. Our services and research are deeply rooted in the rich data provided by OSM, and we have continuously strived to enhance its usability and impact. One of our flagship projects, openrouteservice (ORS), has been a crucial part of this mission, helping to extend the reach and utility of OSM data for over a decade.
Starting as a small research project of the GIScience Group at the University of Heidelberg at around 2008, ORS has been steadily growing since, ensuring that everyone get free and equal access to basic mobility solutions every day.
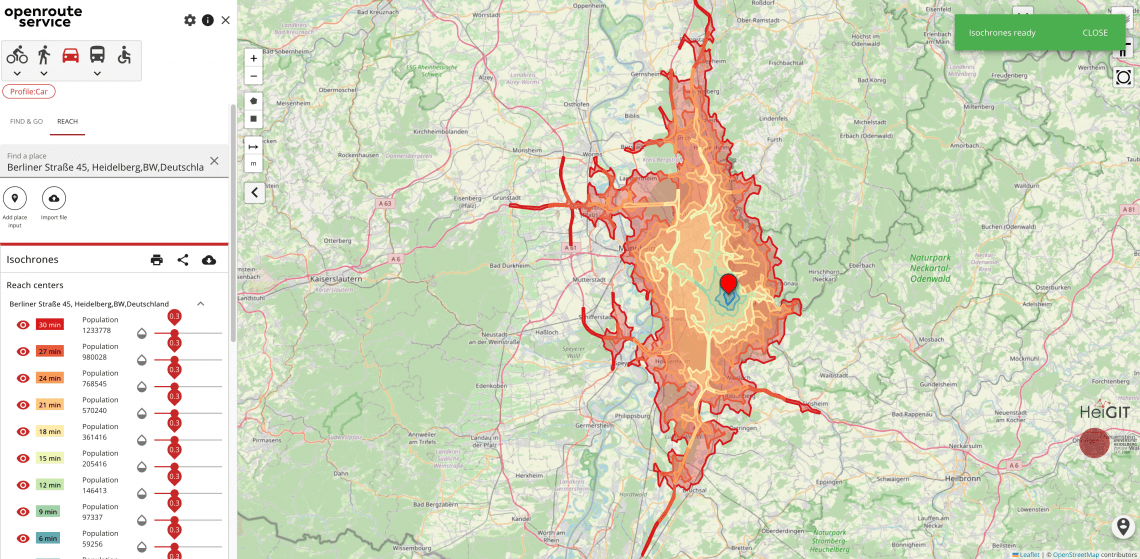
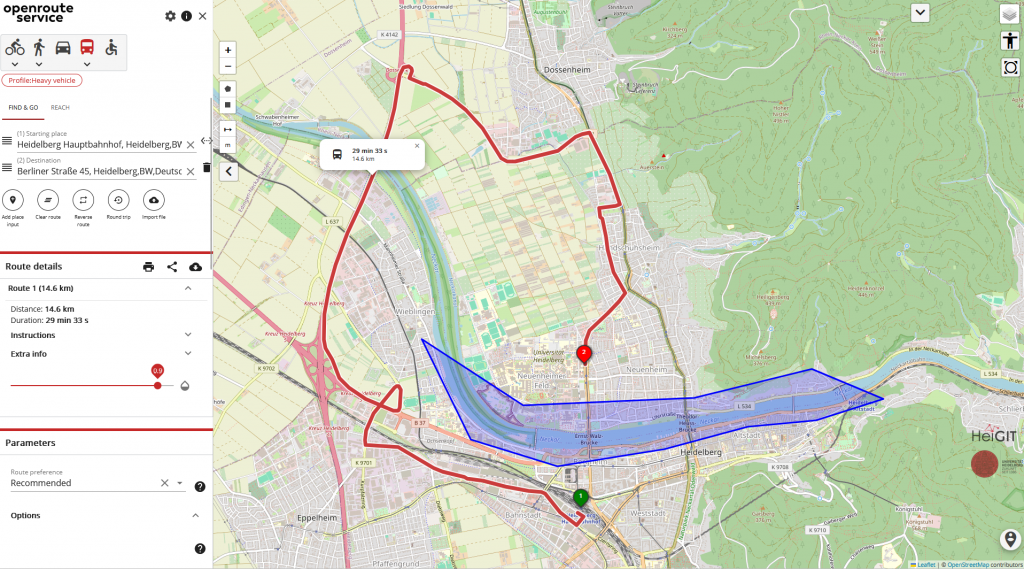
With over ten years of history and over 120,000 users, ORS has established itself as a cornerstone in the area of open-source and OSM-based routing engines. Driven by the increasing availability of road network data through the OpenStreetMap project, ORS has steadily grown, evolving to offer a wide array of services. These range from standard routing, isochrones, and vehicle optimization to custom routing algorithms tailored for specific use cases, such as disaster relief operations in areas affected by floods or earthquakes.
As ORS continued to grow, its global reach expanded significantly, including routing capabilities for the Americas. This global expansion was accompanied by technical enhancements such as gradient-based routing and mobile compatibility, enabling users to access and utilize ORS more efficiently in diverse contexts. To further democratize access, we launched our public and complimentary API, offering fair quotas for a wide range of mobility tools, including routing, isochrones, matrix, vehicle optimization, geocoding, and numerous other features. This step has made ORS more accessible to users and developers, fostering innovation and collaboration across the community.
In addition to broadening its geographic scope, ORS has consistently focused on improving data quality and service reliability. The launch of OpenFloodRiskMap in 2016 is a testament to this commitment. By integrating critical infrastructure data from OSM with emergency routing, this tool provided a valuable resource for managing flood risks and planning evacuation routes. Such initiatives underscore ORS’s role in leveraging OSM data to address real-world challenges, from everyday navigation to emergency response.
In early 2019, the project was transferred to the HeiGIT. This transition allowed ORS to operate with greater autonomy, ensuring that decisions are driven by social, ethical, and environmental considerations. This unique positioning has attracted over 600 prominent non-profit, non-governmental and research organizations to utilize and build upon ORS’s service APIs. These organizations apply ORS in diverse scenarios, including disaster relief, supply chain management, accessibility analysis, and more.
As ORS continues to evolve, we remain committed to supporting the OSM community. Our latest release, version 8, offers insights into nearly a decade of OSM-driven open-source software development, highlighting the challenges and successes of running a global public API. As we navigate the professionalization of open-source software, we remain focused on ensuring that ORS continues to provide reliable, accurate, and explainable routing solutions based on OSM data.
We continue to build a more connected and informed world, one map edit at a time, and contribute to the ever-growing OSM community. We will continue to enhance the accessibility, usability, and impact of OSM data, staying true to our mission of open and free geoinformation technologies.
To keep up with future developments and releases related to this project as well as other efforts to advance geospatial technology in the mobility, humanitarian aid, and data analytics space, follow the social media channels and stay up to date on our blog.
References:
Neis, P. & Zipf, A (2008): OpenRouteService.org is three times “Open”: Combining OpenSource, OpenLS and OpenStreetMap. GIS Research UK (GISRUK 08). Manchester.
Celebrating 10 Years of Openrouteservice – The First OpenStreetMap Route Planner