The big spatial data analytics team at HeiGIT is currently developing the ohsome OpenStreetMap history analytics platform. Our aim is to make OSM’s full-history data more easily accessible for various kinds of data analytics tasks on a global scale.
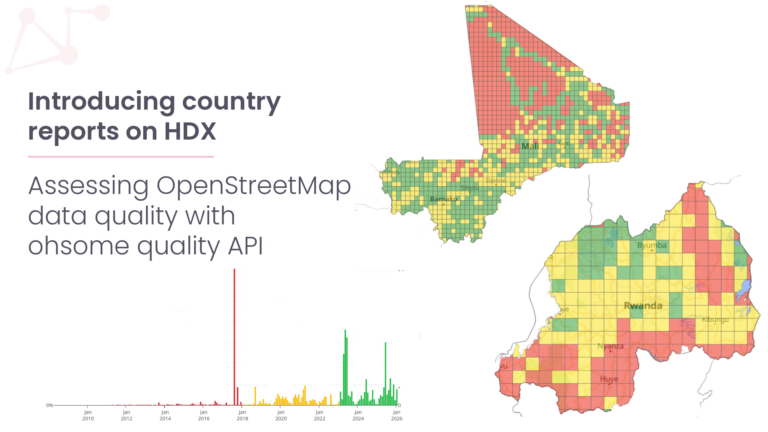
OpenStreetMap (OSM) is a freely available map of the world to which everyone may contribute geographic information. This makes OSM a rich resource that is diverse with respect to feature variety and scale. At the same time, its data quality is of significant regional variance and also constantly changing over time. OSM’s richness makes it often difficult to assess OSM data quality extrinsically, i.e. by comparing it to external reference data sets because many of OSM’s features are not found in those data sets.
Analysing historical OSM data provides great insight into the evolution of the map. This supports assessing OSM data quality intrinsically, i.e., without comparing to other data sets. However, operating on OSM’s raw full-history data is complex and computationally intensive – especially on a global scale and while there are are several methods and tools for some specific purposes no general purpose software is available for such analyses.
The ohsome data analytics platform eases the analysis of OSM history data by providing high-level interfaces to different spatio-temporal data backends. As its central component, the HeiGIT big spatial data analytics team is developing the OpenStreetMap history database (oshdb), which applies big data technology in order to permit one to deploy the ohsome platform in a scalabe cluster computing environment.
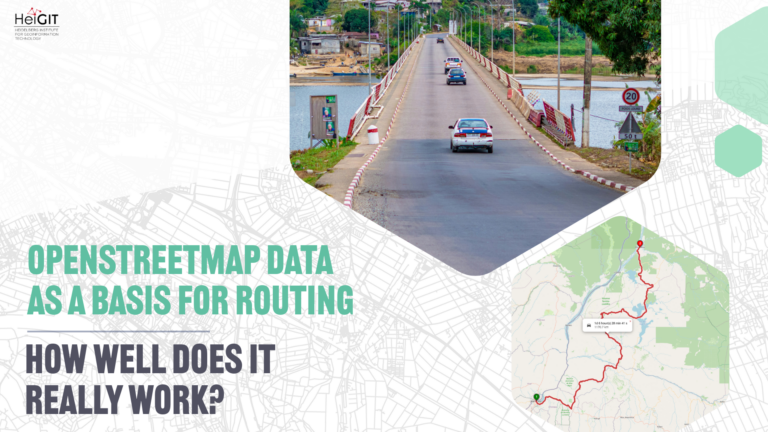
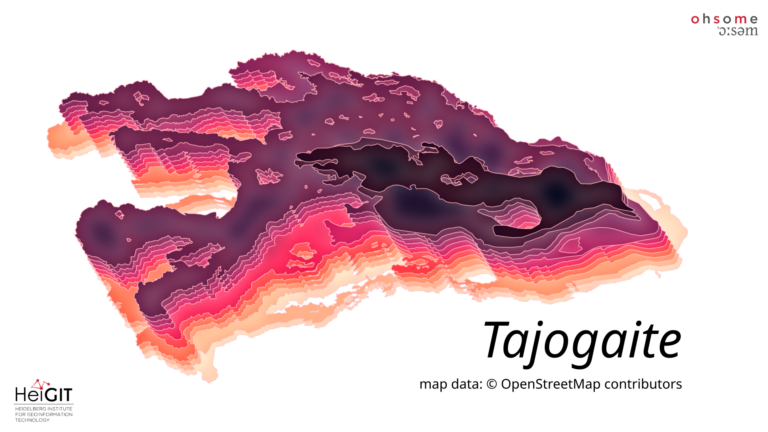
Possible applications of the ohsome platform range from web dashboards over data quality assessment to custom data analysis.
Both ohsome and the oshdb are planned to be released as open source software during 2018.
This work is supported by the Klaus Tschira Foundation, Heidelberg. It builds upon earlier and current research on extrinsic and intrinsic OSM data quality analytics of the GIScience Research group and the growing international body of literature.
BTW: ohsome is pronounced awesome 😉
![]()
Selected References:
Barron, C., Neis, P. & Zipf, A. (2013): A Comprehensive Framework for Intrinsic OpenStreetMap Quality Analysis. Transactions in GIS, DOI: 10.1111/tgis.12073.
Ballatore, A. and Zipf, A. (2015): A Conceptual Quality Framework for Volunteered Geographic Information. COSIT – CONFERENCE ON SPATIAL INFORMATION THEORY XII. October 12-16, 2015. Santa Fe, New Mexico, USA. Lecture Notes in Computer Science, pp. 1-20.
Degrossi L.C., J. Porto de Albuquerque, R. dos Santos Rocha, A. Zipf (2018 accepted): A taxonomy of quality assessment methods for volunteered and crowdsourced geographic information. Transactions in GIS. DOI:10.1111/tgis.12329
Mocnik, F.-B., Zipf, A., Raifer, M. (2017): The OpenStreetMap folksonomy and its evolution. Geo-spatial Information Science. DOI: 10.1080/10095020.2017.1368193.
Jokar Arsanjani, J., Zipf, A., Mooney, P., Helbich, M. (Eds.)(2015): OpenStreetMap in GIScience: Experiences, Research, and Applications. Series: Lecture Notes in Geoinformation and Cartography. 2015, VII, 373 p. Sringer Science. Heidelberg, Berlin. ISBN 978-3-319-14279-1
Neis, P., Zielstra, D. & Zipf, A. (2013): Comparison of Volunteered Geographic Information Data Contributions and Community Development for Selected World Regions. Future Internet. Vol. 5, pp. 282-300.
Neis, P. & Zipf, A. (2012): Analyzing the Contributor Activity of a Volunteered Geographic Information Project – The Case of OpenStreetMap. ISPRS International Journal of Geo-Information. Vol.1(2), pp.146-165. MDPI. DOI:10.3390/ijgi1020146
Roick, O., Hagenauer, J. & Zipf, A. (2011): OSMatrix – Grid based analysis and visualization of OpenStreetMap. SOTM-EU 2011. State of the Map EU. Scientific Track. Wien.